
邮箱:sensor&aliyun.com(&换成@)
Q Q:2735 87871

美国PNI的TCM系列高精度三轴电子罗盘由三轴磁传感器与三轴加速传感器组成,它结合PNI多年积累的磁传感器应用经验,对电子罗盘进行了硬磁补偿、软磁补偿和倾角补偿等,确保此高精度三轴电子罗盘输出准确的方向及姿态信息。
当GPS失效或者受影响时(如:水下,地下,桥下,隧道里或者建筑物内),PNI的倾角补偿电子罗盘TCM-XB将可以起到很大的作用。PNI的电子罗盘TCM-XB能提供可靠的、精确的方位角、横滚角和俯仰角等信息。TCM-XB是非常容易安装使用的,它实际上能在任何方向安装,并且提供四种校正模式,从而良好的实现从一个平面至360度球形体的使用范围。TCM-XB电子罗盘在现实环境中超好的性能表现,使它非常适合航位推测导航、远目标定位、AUV导航、ROV导航、目标跟踪、测距和地震监测等及其他更多应用。
美国PNI TCM XB三轴倾角补偿电子罗盘优势特点
低功耗高精度
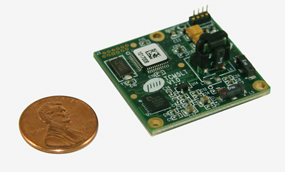 TCM-XB倾角补偿数字罗盘提供工业级最高精度。它使用了PNI专利的磁传感器SEN-XY,具用非常高的分辩率;使用了PNI专有的生产校正平台,确保TCM-XB绝对的高精度。另外,TCM-XB专门考虑了温度和噪声影响,温度和噪声对它的影响极小,不会因此产生零漂。
TCM-XB倾角补偿数字罗盘提供工业级最高精度。它使用了PNI专利的磁传感器SEN-XY,具用非常高的分辩率;使用了PNI专有的生产校正平台,确保TCM-XB绝对的高精度。另外,TCM-XB专门考虑了温度和噪声影响,温度和噪声对它的影响极小,不会因此产生零漂。
先进的校正系统
使用PNI先进的硬磁和软磁校正算法,您系统中固有的磁失真将自动被估算、评估、校正,最后得到准确的方向数据。您可以根据应用的环境,选择适合您的校正模式。
安装方便
TCM-XB电子罗盘可以朝向任意方向进行安装,安装非常方便,同时TCM电子罗盘能在任何使用环境中都有很好的性能表现,而不仅仅只是在工厂。
美国PNI TCM XB三轴倾角补偿电子罗盘应用范围
- 机器人
- 爆炸军械布置(EOD)
- 边界岗哨
- 自动搜索和营救
- 海洋研究
- 气象绘图
- 武器探测和除暴
- 海岸钻控平台服务
- 海洋学勘测
- 位置&救助
- 建筑物监控
- 矿物搜索
- 声纳浮标(洋流图、水下安全系统、海洋种群追踪)
- 电子战场(训练、模拟分析战况、战略战场信息管理、武力监测、绘图分析和武器方位)
- 无人移动体传感
- 放射品、化学物品、生物体漂移监测
- 边办安全监控
- 车载与手持岗哨
- 军用激光测距仪
- 定点测量数据收集仪器
- 石化探测和开采
- 采矿
- 钻孔分析
- 管道监测
- 地震倾角传感
- 快速卫星捕获
- 微波发身方向
- 卫星信息获取(SNG)
- 天线平台倾角传感
- 射击位置监测系统
- 驾驶循迹系统
美国PNI TCM XB三轴倾角补偿电子罗盘的应用案例
美国PNI TCM XB三轴倾角补偿电子罗盘性能参数
| 参数名称 | 条件 | TCM XB电子罗盘 | 单位 |
|---|---|---|---|
| 航向量程 | 360 | 度 | |
| 航向静态精度 | 全量程校正后≤65度 | <0.3 | 度RMS |
| 全量程校正后≤80度 | <0.5 | 度RMS | |
| 2D校正后≤5度 | <2.0 | 度RMS | |
| 限制倾角校正≤2倍校正角度1 | <2.0 | 度RMS | |
| 航向分辨率 | 0.1 | 度 | |
| 航向重复性 | 0.05 | 度RMS | |
| 俯仰角量程 | +/-90 | 度 | |
| 横滚角量程 | +/-180 | 度 | |
| 俯仰角精度 | 0.2 | 度RMS | |
| 横滚角精度 | 横滚角≤65度 | 0.2 | 度RMS |
| 横滚角≤80度 | 0.4 | 度RMS | |
| 横滚角≤86度 | 1.0 | 度RMS | |
| 横滚角分辨率 | 0.01 | 度 | |
| 横滚角重复性 | 0.05 | 度RMS | |
| 最大倾斜角度 | 85 | 度 | |
| 磁力计校正磁场量程 | +/-125 | uT | |
| 磁力计分辨率 | 0.05 | uT | |
| 磁力计重复性 | +/-0.1 | uT |
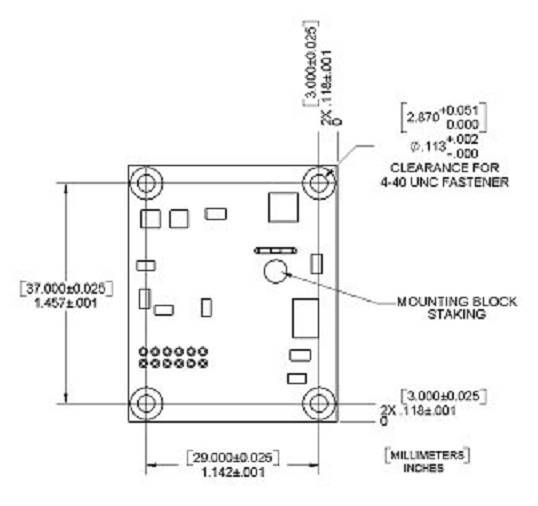
美国PNI TCM XB三轴倾角补偿电子罗盘外观说明
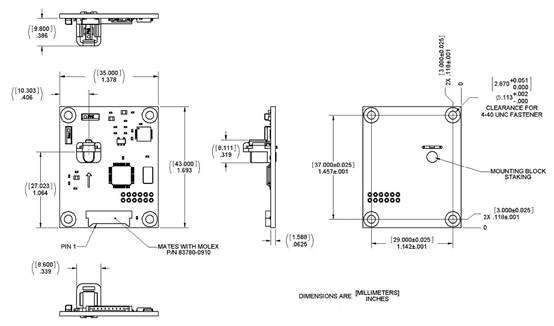
TCM XB电子罗盘机械结构图
美国PNI TCM XB三轴倾角补偿电子罗盘安装说明
TCM-XB使用了MEMS技术的加速度传感器来测量罗盘的倾斜角度,即俯仰角和横滚角,这两个角度数据被用来作电子罗盘的方位角计算过程中的倾角补偿。
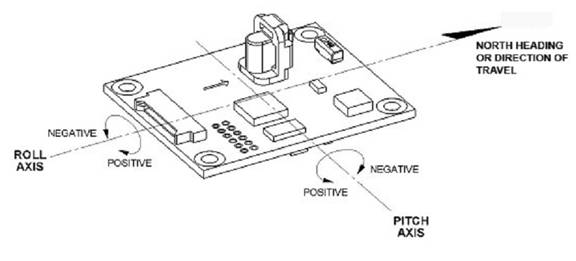
我们使用“欧拉角”方法来描述我们的准确方向。这种方法是和飞机的描述方法一样的,把一个物体的3个方位角表示为:航向角、俯仰角和横滚角。横滚角是指绕着机身中线旋转的角度;俯仰角是指绕着机翼中线旋转的角度;而航向角则是指机身中线与机翼中线重直的轴线旋转的角度。如下图。
针对TCM-XB正的俯仰角是指在TCM-XB模块边缘在上方旋转,正的横滚角是指模块右边在模块下方。
TCM XB在做出厂前的校正时是基于安装孔(如下图)来进行校正的。我们使用TCM XB也一样,必须依靠这些安装孔来安装固定TCM XB,另外还需保证作为TCM XB的基准物或者固定TCM XB的螺丝是不导磁的材料。
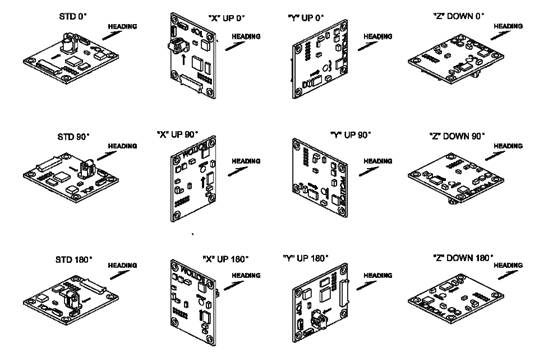
TCM XB可以在朝向各个方向安装,但所有的参考点都是基于TCM XB模块正面的丝印箭头。如下图:
传真:
Q Q:
公司地址:
 在线客服
在线客服
